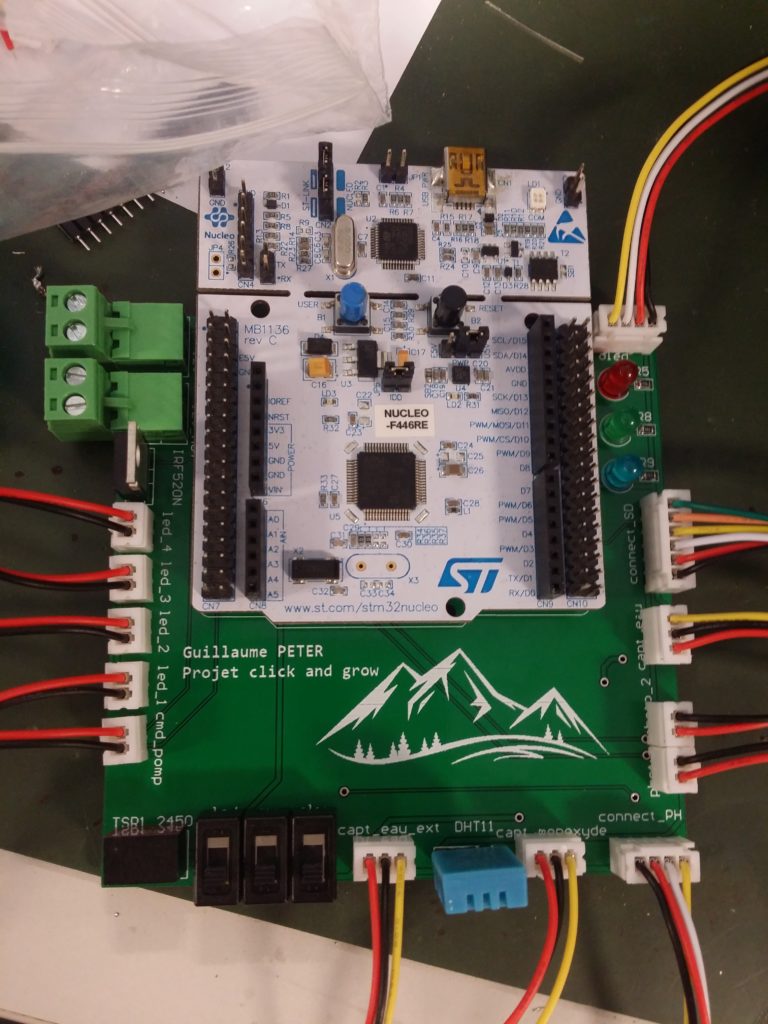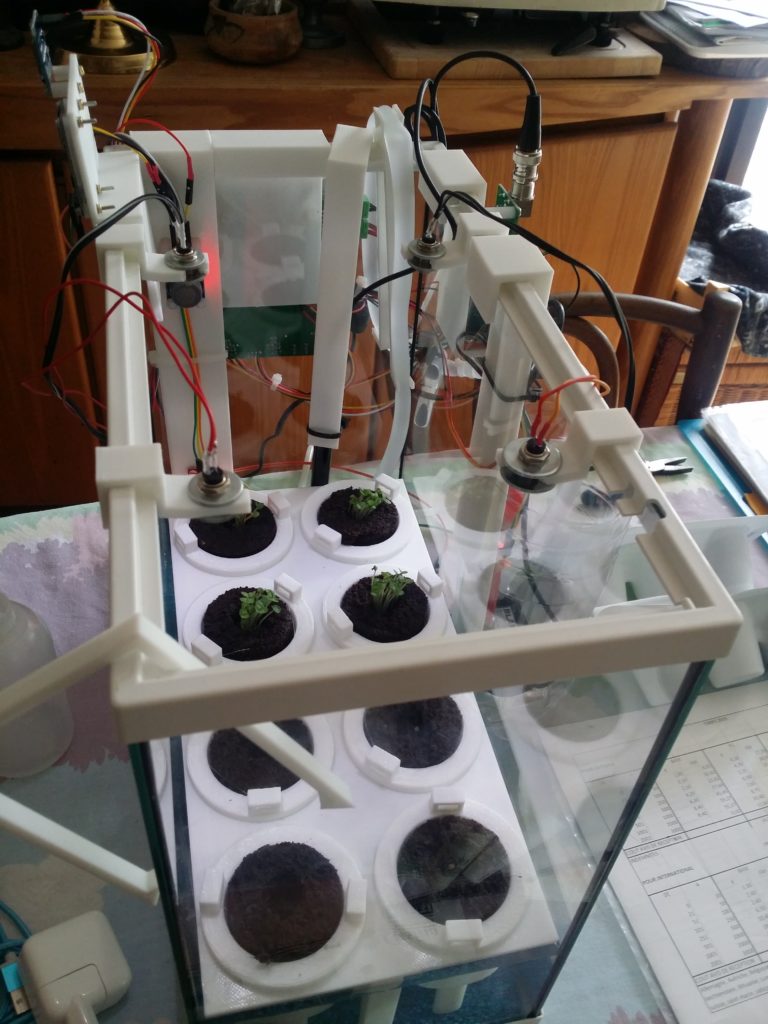
J’ai voulu recréer les produits développés par click and grow. J’ai donc développé mon propre circuit imprimé pour cela et j’ai utilisé un aquarium que j’avais pour mes poissons rouges. Dans le projet il y a un capteur de PH, un capteur de C02, deux capteurs de niveaux d’eau, l’affichage de données sur l’écran oled ainsi que la sauvegarde de ces données sur une carte SD.