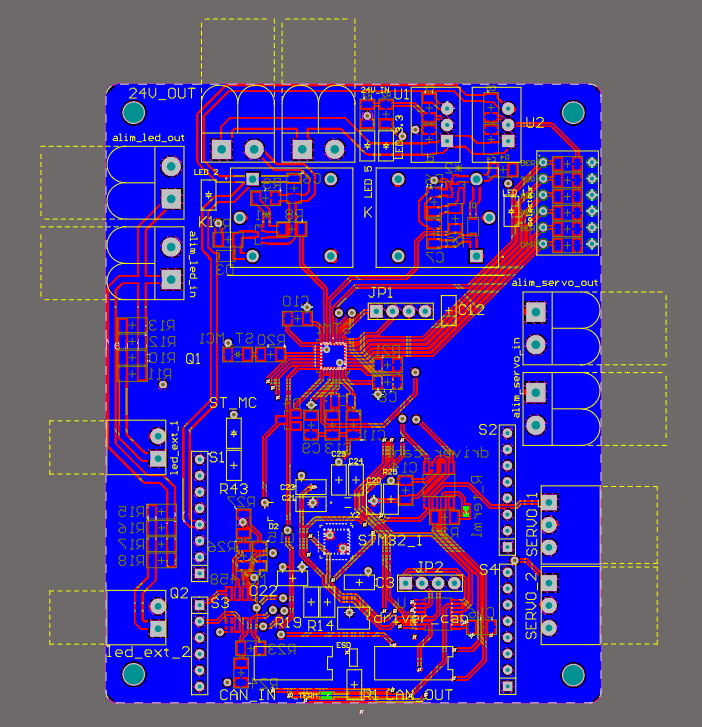
Pour piloter le nouveau robot que je suis en train de faire, j’ai développé une carte sur mesure pour pouvoir piloter deux moteurs à courant continu, deux servomoteurs et encore bien d’autres choses. L’objectif de ces cartes est de pouvoir les chaîner entre elles pour contrôler les 6 roues du robot. L’ensemble de ces cartes sont reliées par liaison CAN et série. Une carte mère permettra de les programmer toutes à partir d’un seul connecteur USB. Cette carte a été réalisée en 4 couches.