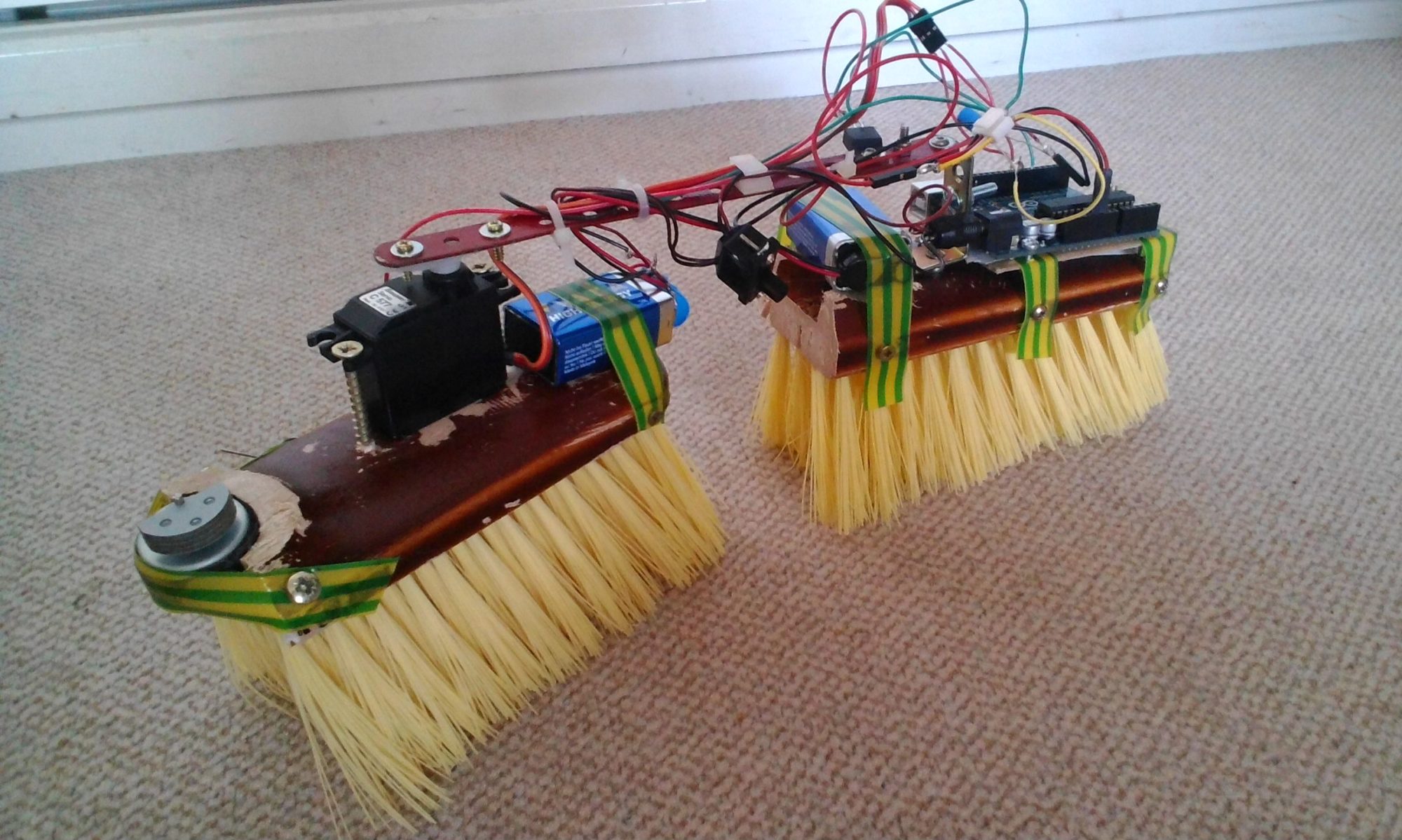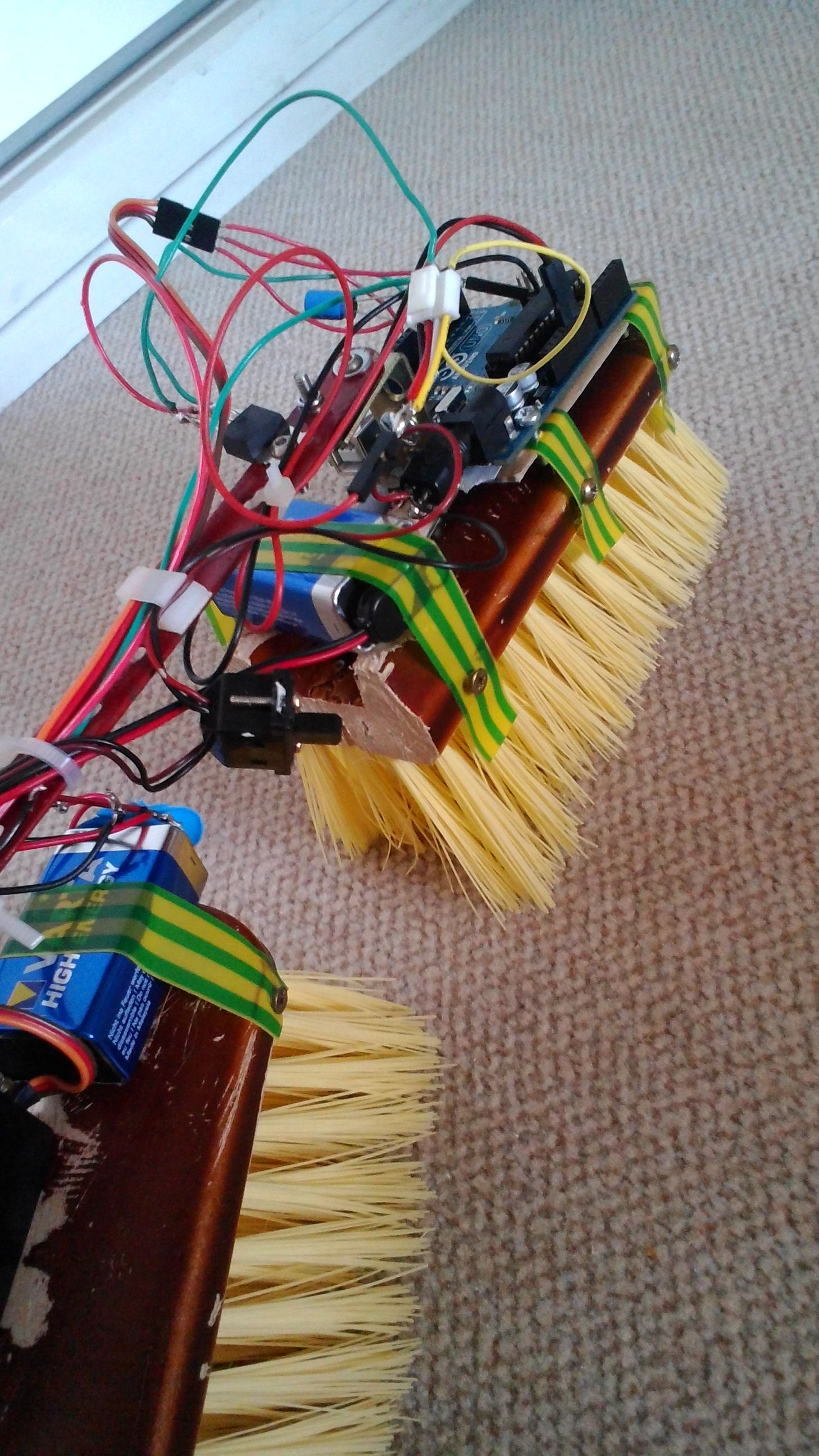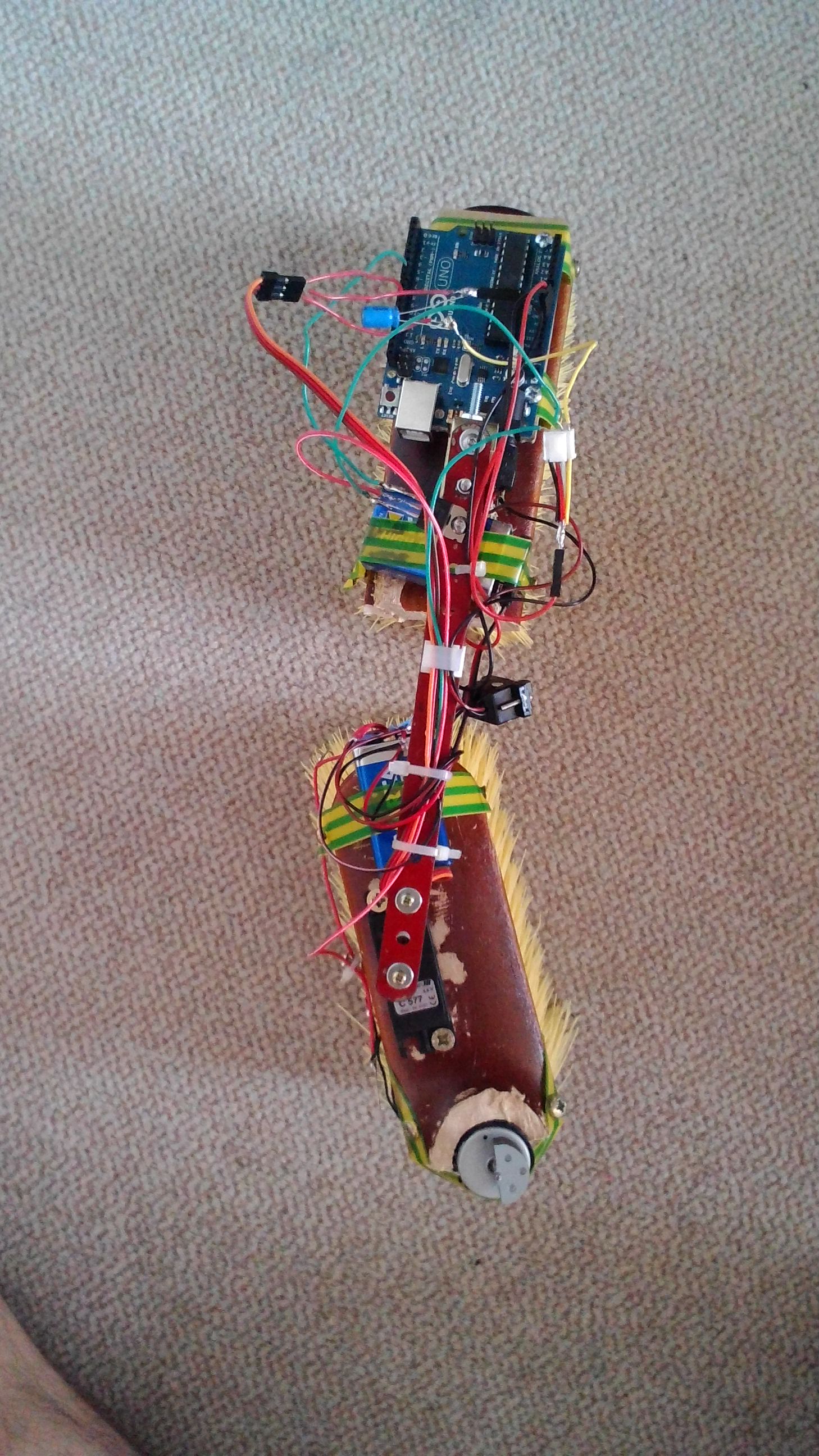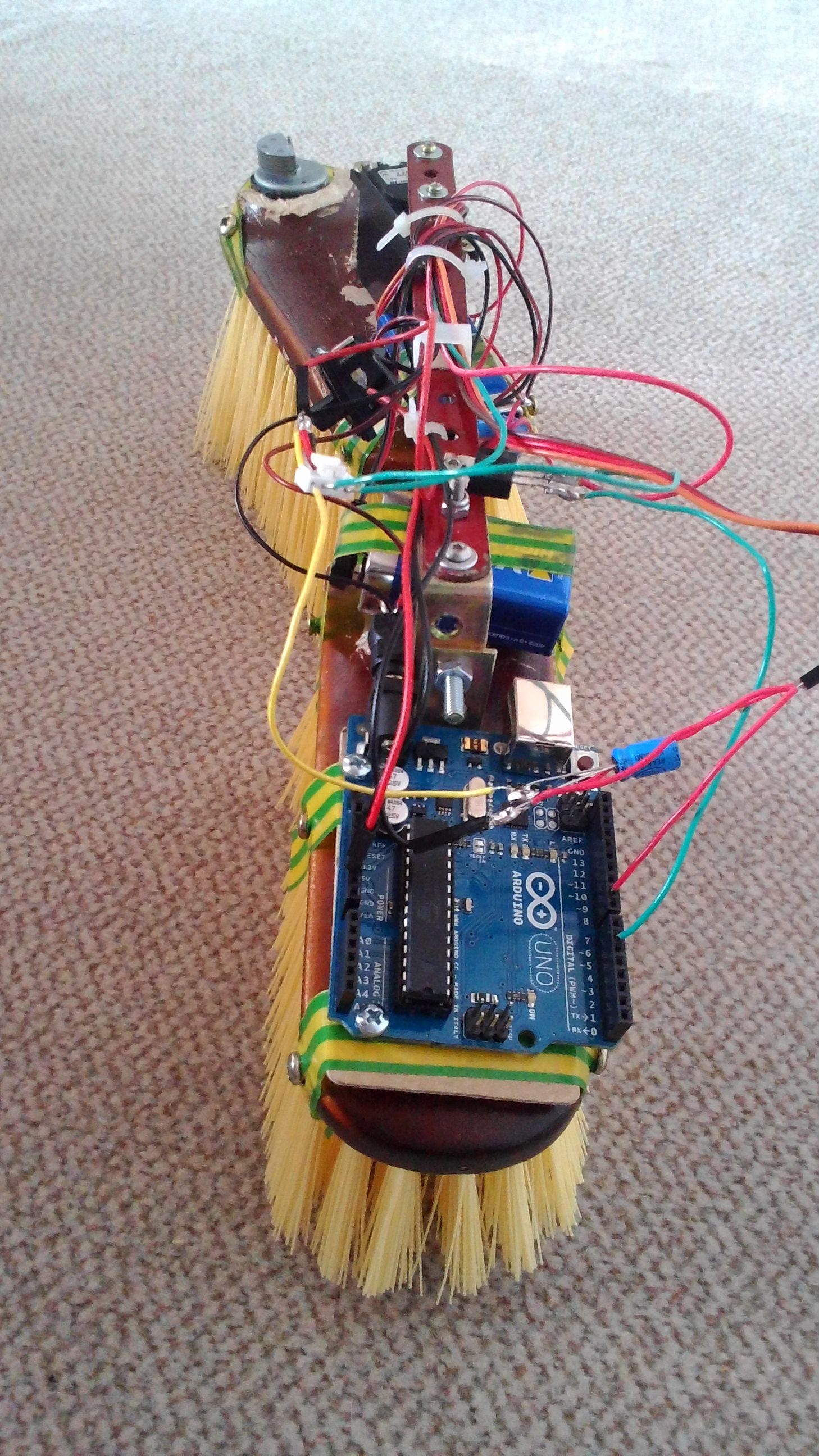
Ce robot est le tout premier que j’ai fabriqué. Il a été élaboré dans le cadre d’un projet en initiation aux sciences de l’ingénieur en classe de seconde. L’objectif était de faire déplacer cette brosse de balai avec précision et vitesse. Le moteur qui permet de la faire avancer, grâce à des vibrations, est un vibreur de manette de PS2 commandé par un transistor MOSFET. Pour gérer la direction un servomoteur a été placé à l’avant du robot juste au-dessus de la brosse. C’est une Arduino UNO qui commande le robot.