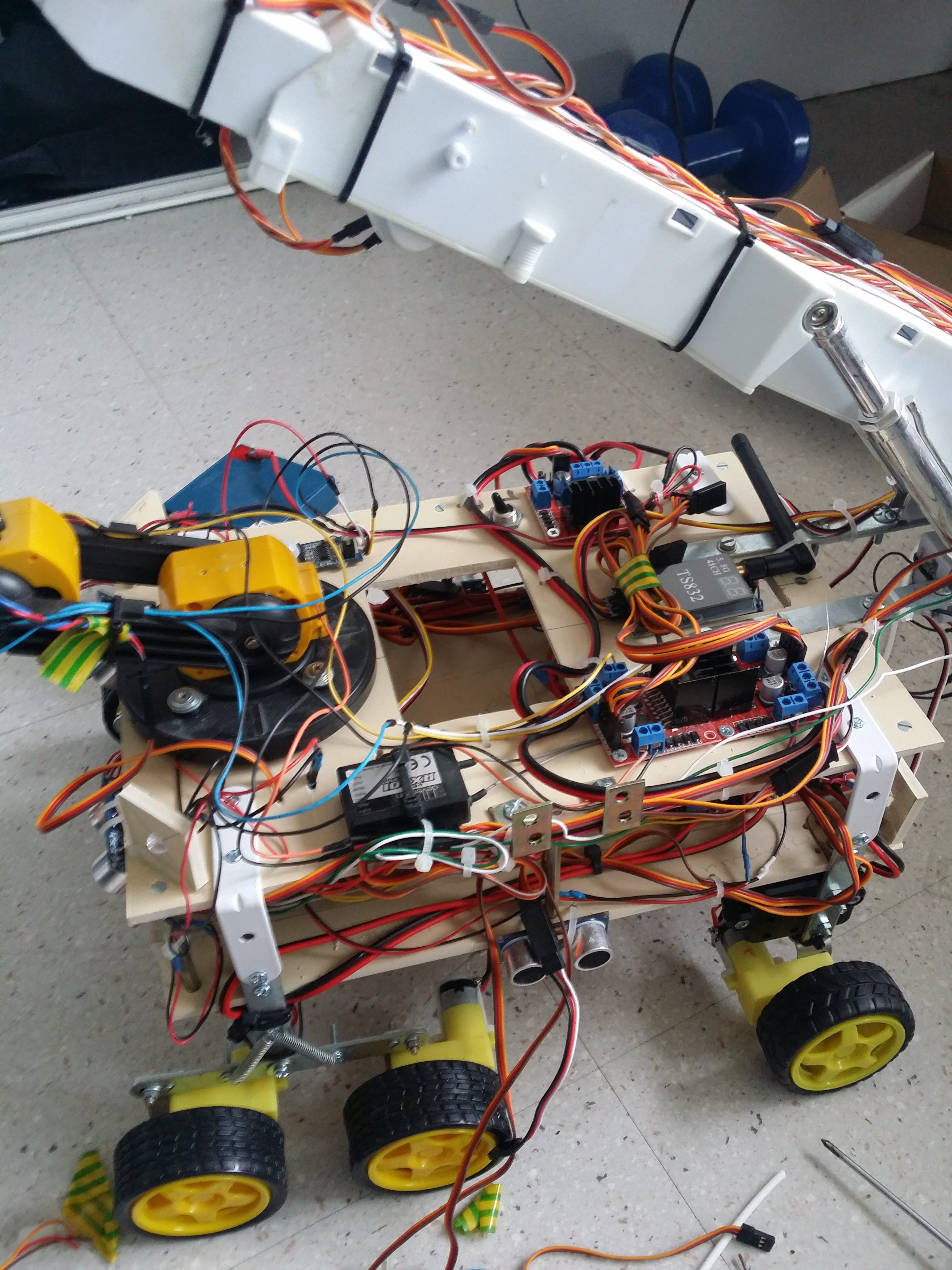
Echo est un rover d’exploration que j’ai développé pendant un an en parallèle de mes cours lors de mon semestre 2 et 3 à l’IUT. Il possède 6 roues motrices, les quatre roues avant étant regroupées par paire dans le but de pouvoir limiter les angles que le châssis pourrait subir s’il doit descendre des obstacles. Il est aussi équipé d’une caméra embarquée permettant de le piloter à distance. Son bras robotisé avant lui permet aussi d’attraper des objets.

Les deux roues arrière sont directionnelles et permettent un déplacement fluide du robot.
Le robot est pilotée par une télécommande modélisme car la communication est déjà mise en place automatiquement et est simple d’utilisation.