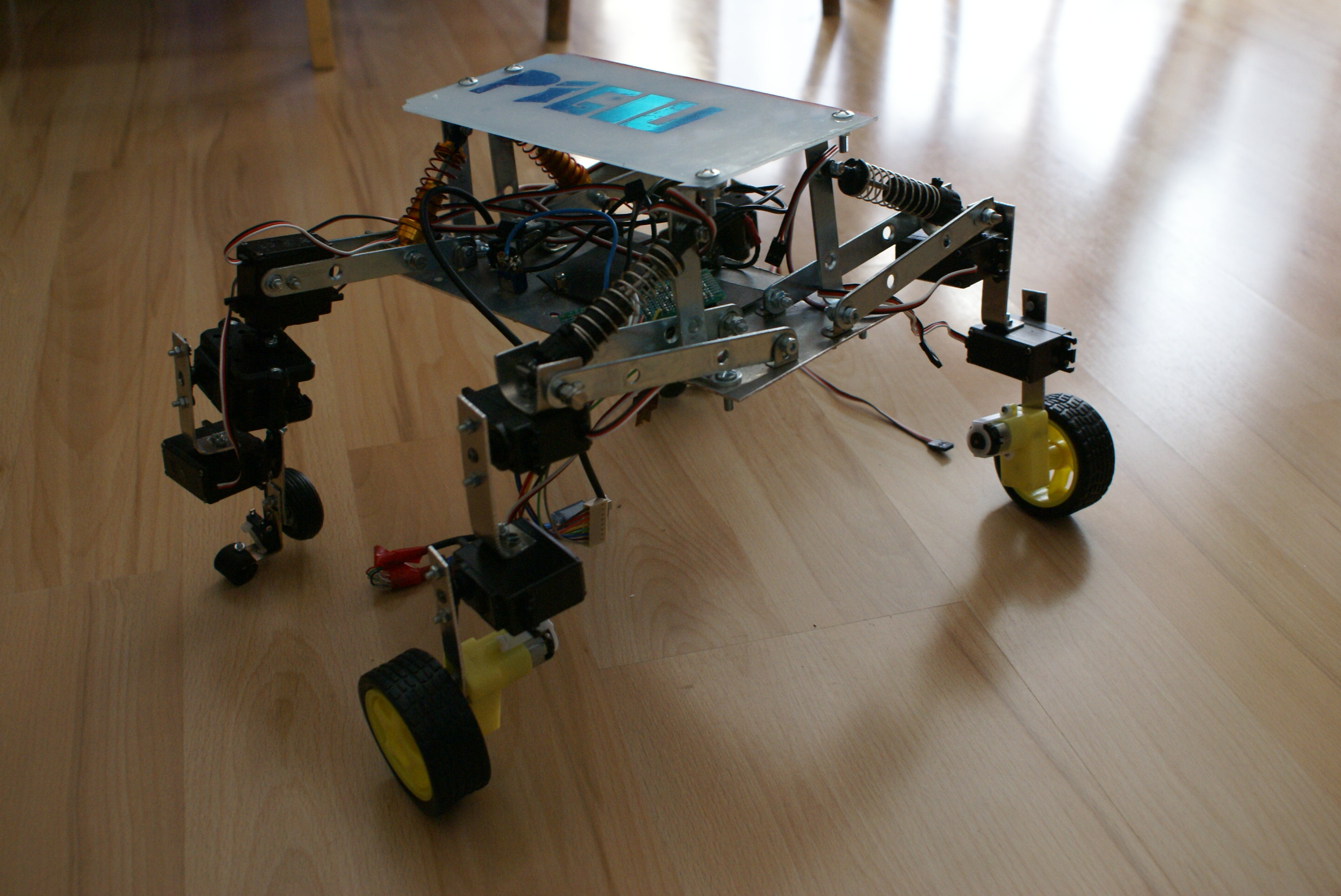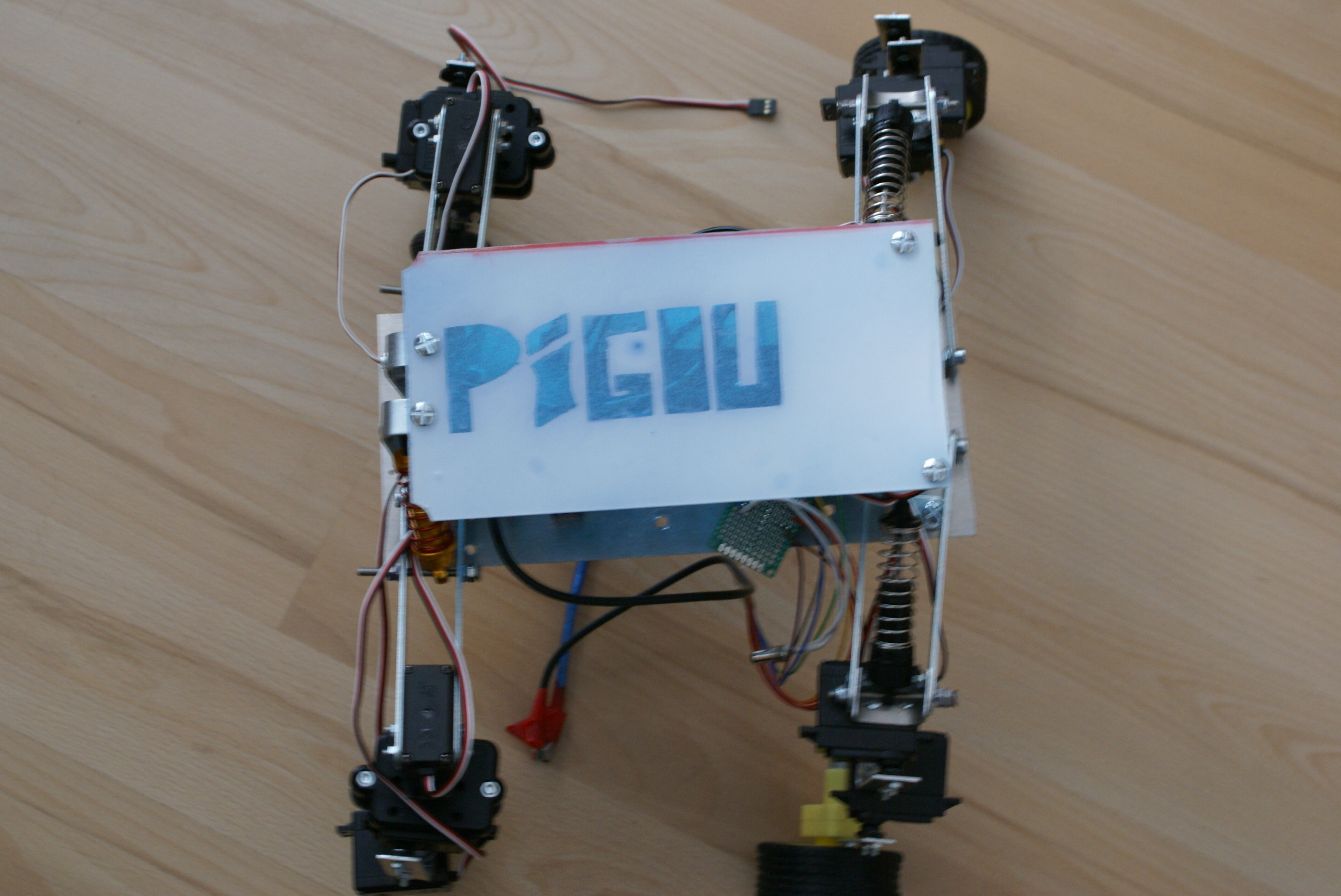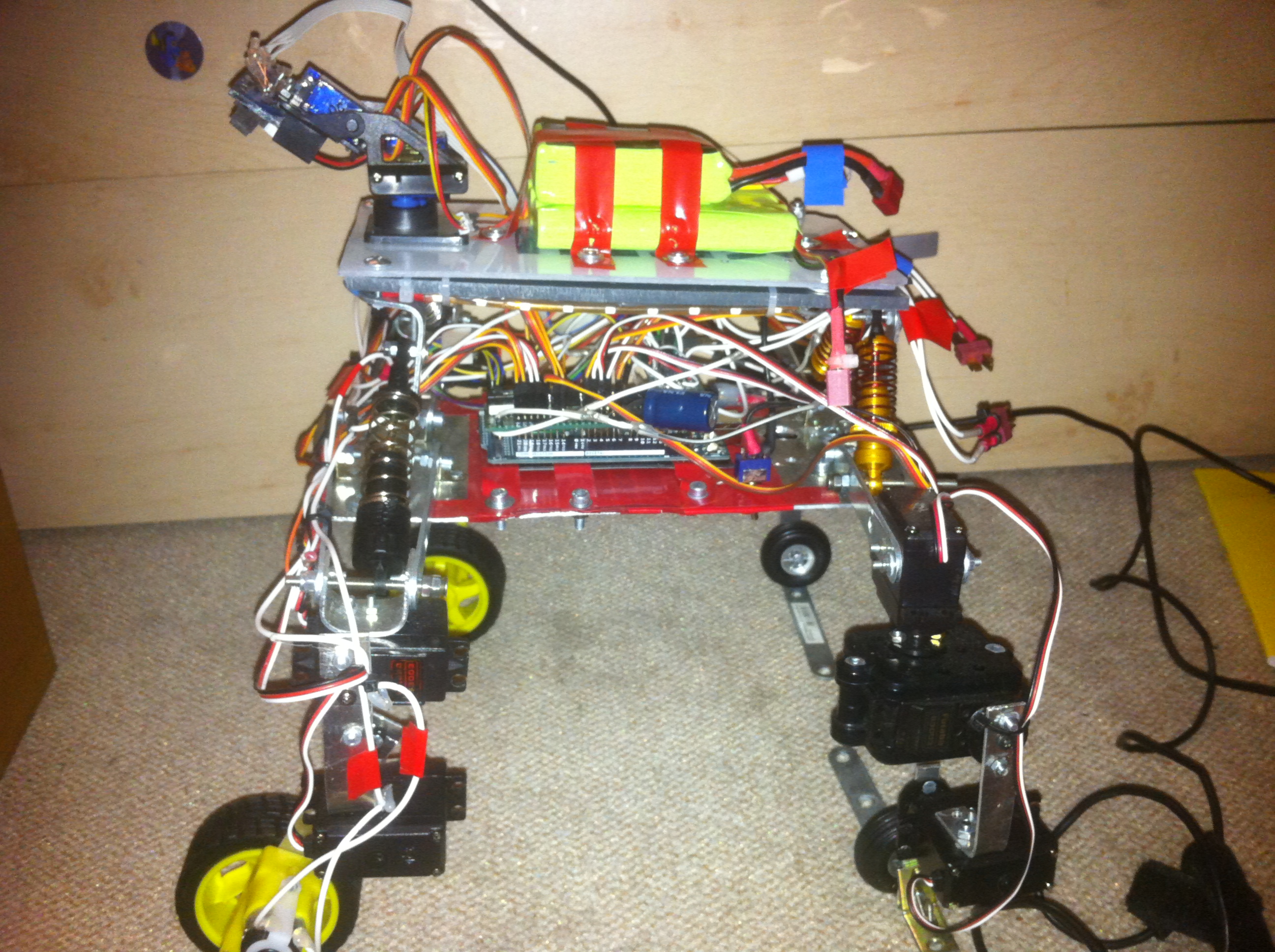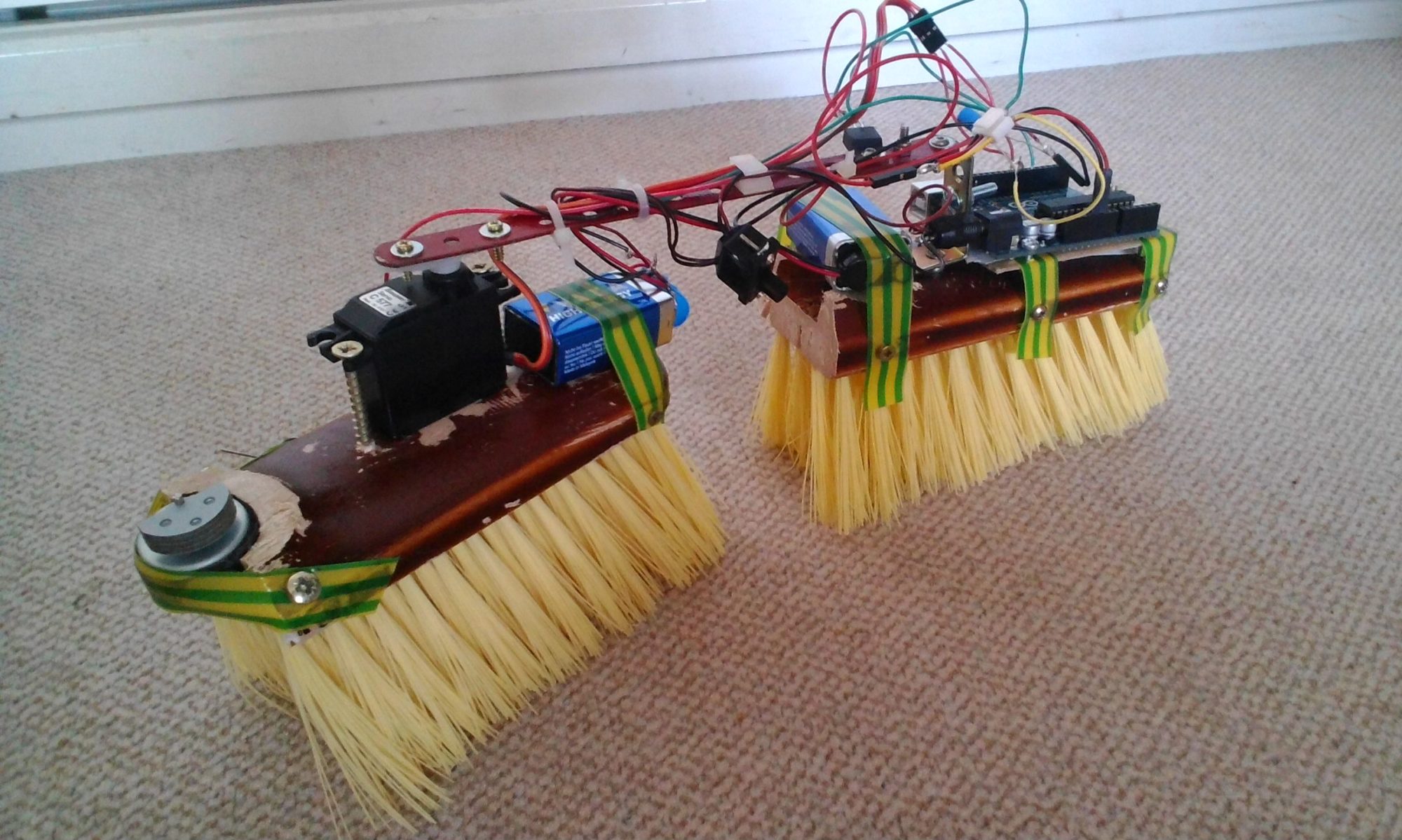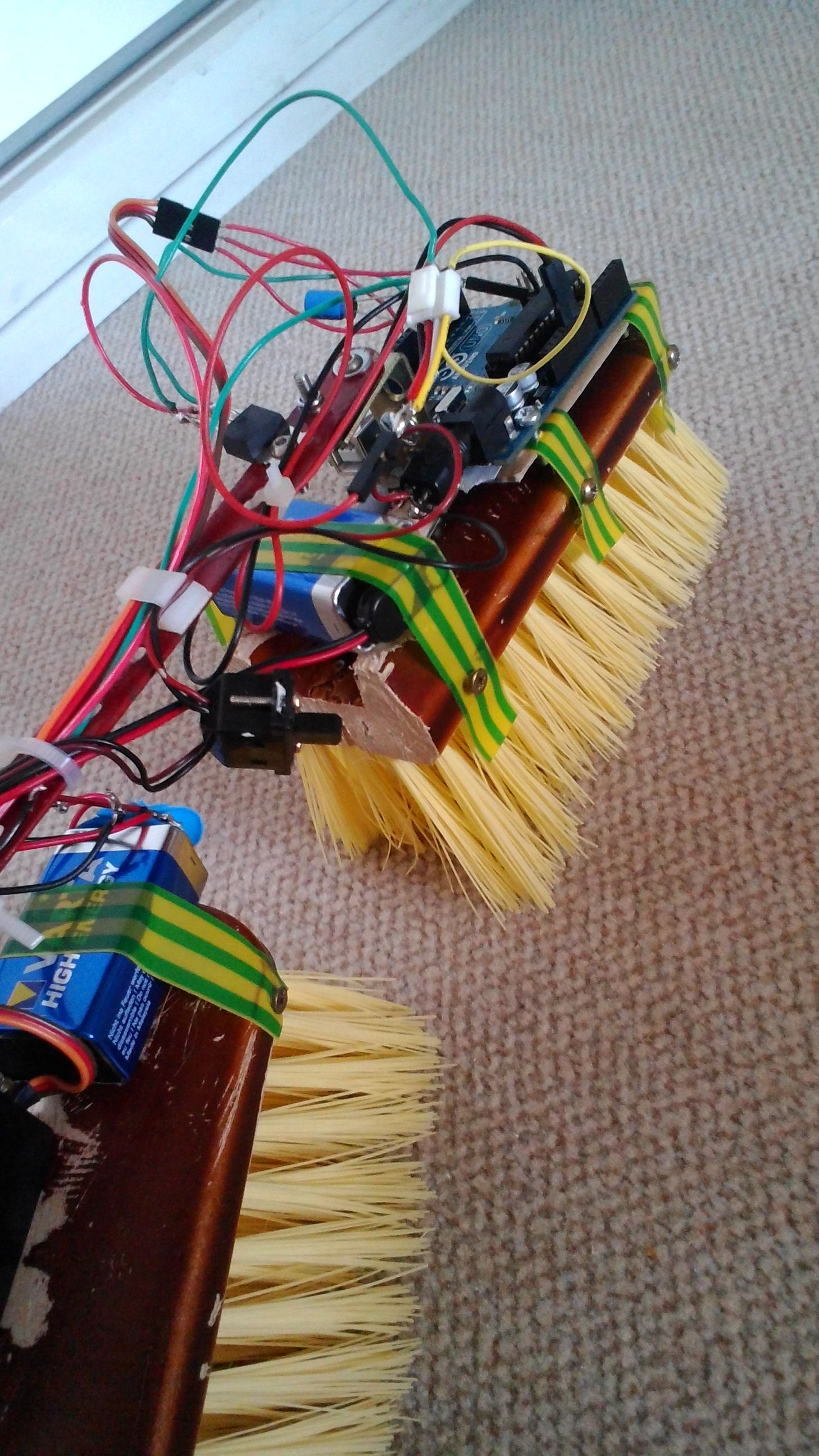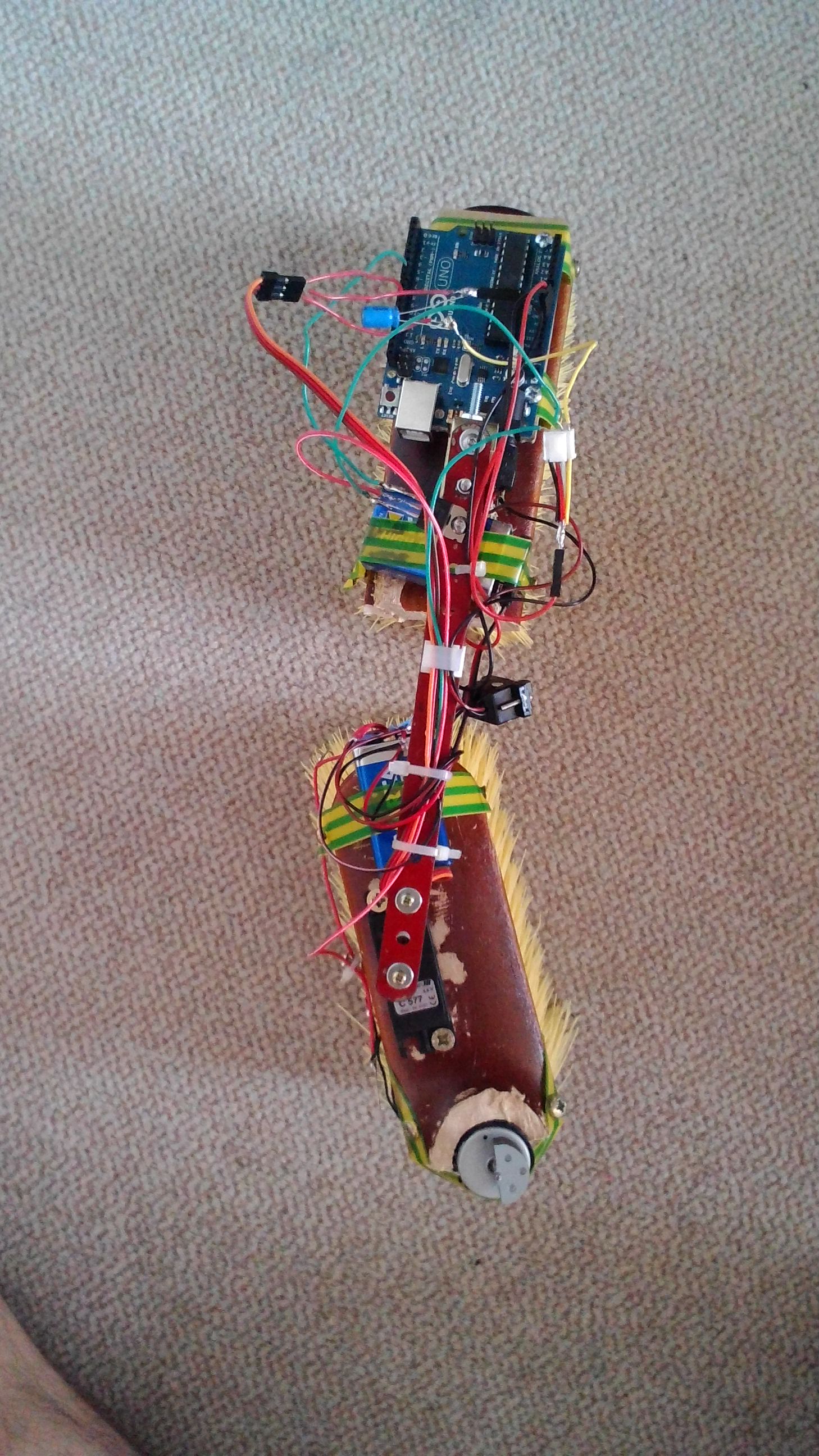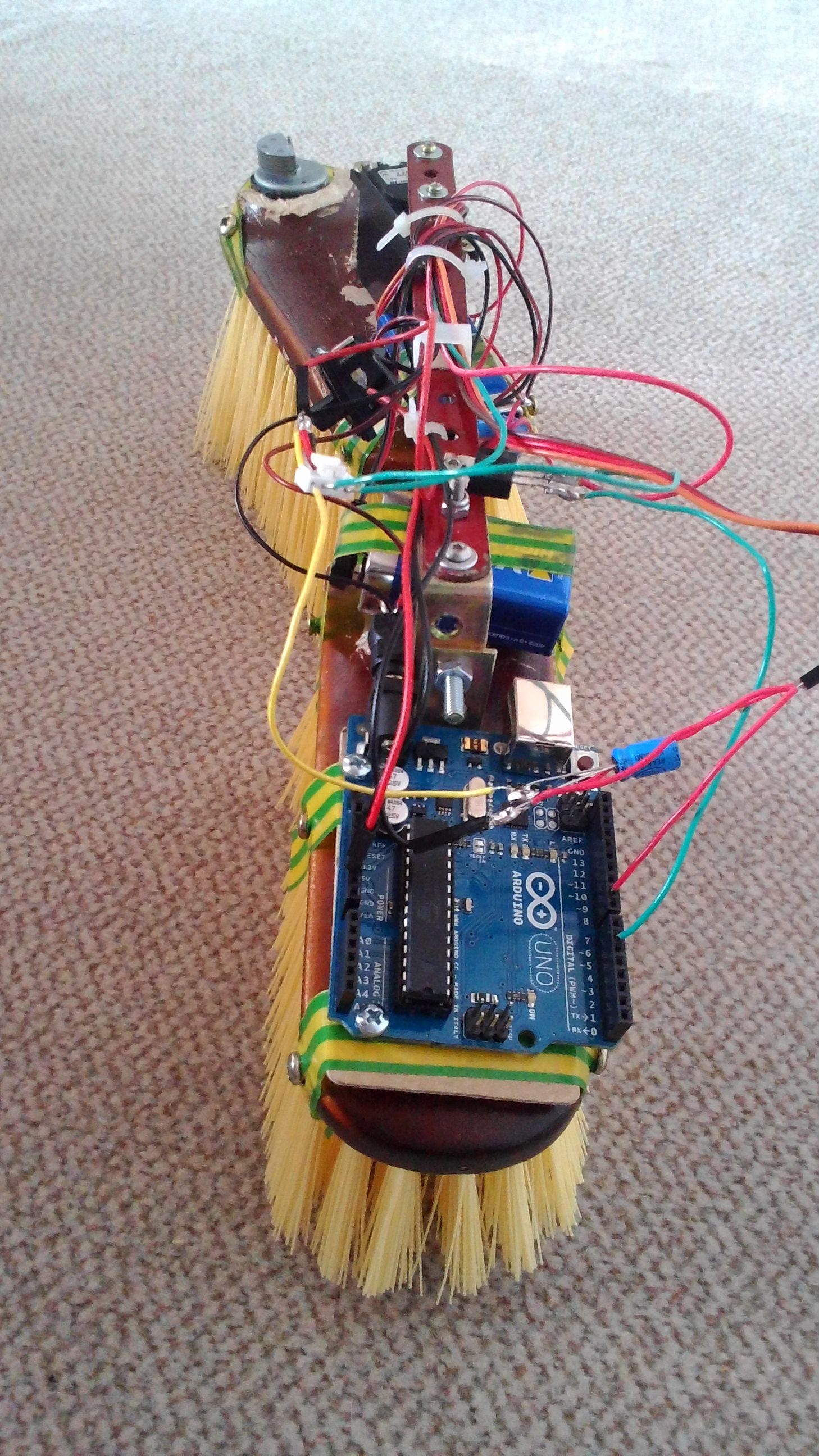
Ce robot développé lors de mon projet de terminale en Sciences de l’ingénieur avec mon groupe avait pour but de créer et construire un robot pouvant marcher et rouler. Pour marcher le robot utilisait ses pattes et pour rouler il utilisait des moteurs munis de roues positionnés sur ses pattes. Il était totalement autonome et était muni d’amortisseur hydraulique de voiture télécommandée pour endurer les chocs.